Motor ovládaný lineárním potenciometrem
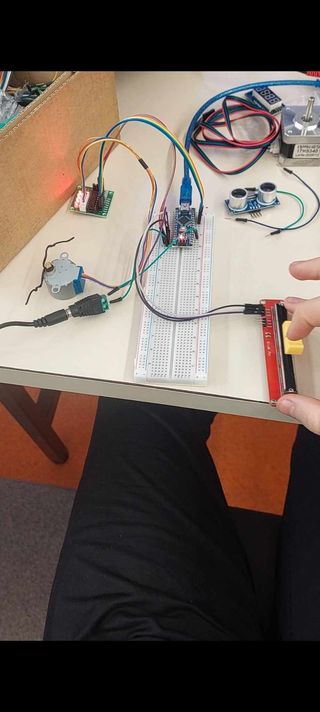
Na cvičení v sedmém týdnu semestru jsem se snažil ovládat krokový motor 28BYJ-48 pomocí lineárního 10KΩ
posuvného potenciometru. Systém byl tvořený na arduinu nano a programován pomocí programu PlatformIO. Na ovládání motoru
jsem využil knihovnu Stepper.h. Zapojení je vidět na obrázku níže.
Také přikládám kód mého řešení:
#include <Arduino.h>
#include <Stepper.h>
#define DTB A2
const int stepsPerRevolution = 2038;
Stepper myStepper = Stepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
Serial.begin(9600);
pinMode(DTB, INPUT);
}
void loop() {
float speed = analogRead(DTB)/64;
myStepper.setSpeed(speed);
myStepper.step(stepsPerRevolution);
delay(100);
}
Největší problém jsem měl při snaze zjistit maximální rychlost motoru, což se mi na konec nepodařilo, proto potenciometr
nefunguje až do krajních poloh. To lze vidět na přiloženém videu.